RocketMQ 集群 理论 搭建
五、集群搭建理论
针对broker集群
1 数据复制与刷盘策略
刷盘:内存到磁盘
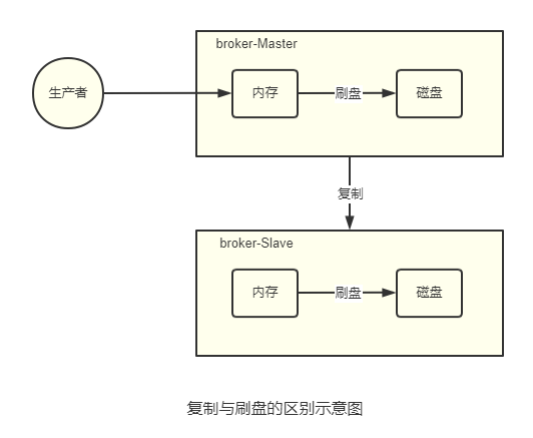
- 复制策略
复制策略是Broker的Master与Slave间的数据同步方式。分为同步复制与异步复制:
同步复制 :消息写入master后,master会等待slave同步数据成功后才向producer返回成功ACK
异步复制 :消息写入master后,master立即向producer返回成功ACK,无需等待slave同步数据成功
异步复制策略会降低系统的写入延迟,RT变小,提高了系统的吞吐量
刷盘策略
刷盘策略指的是broker中消息的落盘方式,即消息发送到broker内存后消息持久化到磁盘的方式。分为 同步刷盘与异步刷盘 :- 同步刷盘 :当消息持久化到broker的磁盘后才算是消息写入成功。
- 异步刷盘 :当消息写入到broker的内存后即表示消息写入成功,无需等待消息持久化到磁盘。
1 )异步刷盘策略会降低系统的写入延迟,RT变小,提高了系统的吞吐量
2 )消息写入到Broker的内存,一般是写入到了PageCache
3 )对于异步 刷盘策略,消息会写入到PageCache后立即返回成功ACK。但并不会立即做落盘操作,而是当PageCache到达一定量时会自动进行落盘。
2 Broker集群模式
根据Broker集群中各个节点间关系的不同,Broker集群可以分为以下几类:
单Master
只有一个broker(其本质上就不能称为集群)。这种方式也只能是在测试时使用,生产环境下不能使用,因为存在单点问题。多Master
broker集群仅由多个master构成,不存在Slave。同一Topic的各个Queue会平均分布在各个master节点上。- 优点 :配置简单,单个Master宕机或重启维护对应用无影响,在磁盘配置为RAID10时,即使机器宕机不可恢复情况下,由于RAID10磁盘非常可靠,消息也不会丢(异步刷盘丢失少量消息,同步刷盘一条不丢),性能最高;
- 缺点 :单台机器宕机期间,这台机器上未被消费的消息在机器恢复之前不可订阅(不可消费),消息实时性会受到影响。
以上优点的前提是,这些Master都配置了RAID磁盘阵列。如果没有配置,一旦出现某Master宕机,则会发生大量消息丢失的情况。
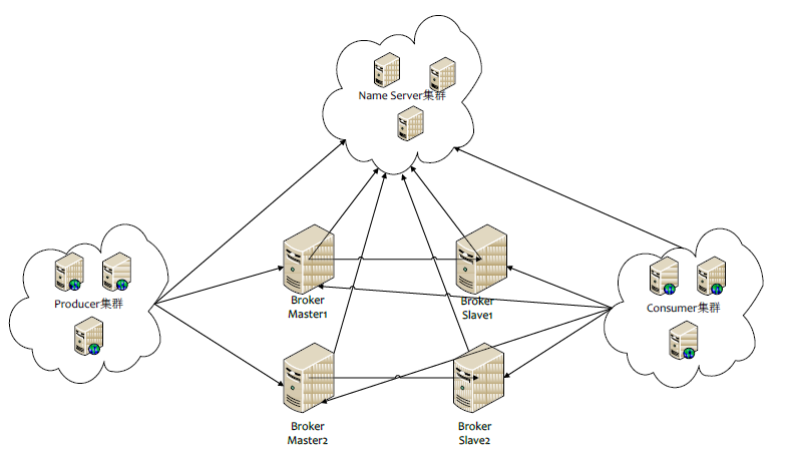
多Master多Slave模式-异步复制
broker集群由多个master构成,每个master又配置了多个slave(在配置了RAID磁盘阵列的情况下,一个master一般配置一个slave即可)。master与slave的关系是主备关系,即master负责处理消息的读写请求,而slave仅负责消息的备份与master宕机后的角色切换。
异步复制即前面所讲的复制策略中的异步复制策略,即消息写入master成功后,master立即向producer返回成功ACK,无需等待slave同步数据成功。
该模式的最大特点之一是,当master宕机后slave能够自动切换为master。不过由于slave从master的同步具有短暂的延迟(毫秒级),所以当master宕机后,这种异步复制方式可能会存在少量消息的丢失问题。
Slave从Master同步的延迟越短,其可能丢失的消息就越少,对于Master的RAID磁盘阵列;
若使用的也是异步复制策略,同样也存在延迟问题,同样也可能会丢失消息。
但RAID阵列的秘诀是微秒级的(因为是由硬盘支持的),所以其丢失的数据量会更少。
多Master多Slave模式-同步双写
- 该模式是多Master多Slave模式的同步复制实现。所谓同步双写,指的是消息写入master成功后,master会等待slave同步数据成功后才向producer返回成功ACK,即master与slave都要写入成功后才会返回成功ACK,也即双写。
该模式与异步复制模式相比,优点是消息的安全性更高,不存在消息丢失的情况。但单个消息的RT(响应时间)略 高,从而导致性能要略低(大约低10%)。
该模式存在一个大的问题:对于目前的版本,Master宕机后,Slave不会自动切换到Master(致命问题)
- 该模式是多Master多Slave模式的同步复制实现。所谓同步双写,指的是消息写入master成功后,master会等待slave同步数据成功后才向producer返回成功ACK,即master与slave都要写入成功后才会返回成功ACK,也即双写。
- 最佳实践
- 一般会为Master配置RAID10磁盘阵列,然后再为其配置一个Slave。即利用了RAID10磁盘阵列的高效、安全性,又解决了可能会影响订阅的问题。
1)RAID磁盘阵列的效率要高于Master-Slave集群。因为RAID是硬件支持的。也正因为如此,所以RAID阵列的搭建成本较高。
2)多Master+RAID阵列,与多Master多Slave集群的区别是什么?
- 多Master+RAID阵列,其仅仅可以保证数据不丢失,即不影响消息写入,但其可能会影响到消息的订阅。但其执行效率要远高于多Master多Slave集群
- 多Master多Slave集群,其不仅可以保证数据不丢失,也不会影响消息写入。其运行效率要低于多Master+RAID阵列
六、磁盘阵列RAID(补充)
1 RAID历史
1988 年美国加州大学伯克利分校的 D. A. Patterson 教授等首次在论文 “A Case of Redundant Array ofInexpensive Disks” 中提出了 RAID 概念 ,即廉价冗余磁盘阵列( Redundant Array of InexpensiveDisks )。
由于当时大容量磁盘比较昂贵, RAID 的基本思想是将多个容量较小、相对廉价的磁盘进行有机组合,从而以较低的成本获得与昂贵大容量磁盘相当的容量、性能、可靠性。随着磁盘成本和价格的不断降低, “廉价” 已经毫无意义。因此, RAID 咨询委员会( RAID Advisory Board, RAB )决定用“ 独立 ” 替代 “ 廉价 ” ,于时 RAID 变成了独立磁盘冗余阵列( Redundant Array of IndependentDisks )。但这仅仅是名称的变化,实质内容没有改变。
2 RAID等级
RAID 这种设计思想很快被业界接纳, RAID 技术作为高性能、高可靠的存储技术,得到了非常广泛的应用。 RAID 主要利用镜像、数据条带和数据校验三种技术来获取高性能、可靠性、容错能力和扩展性,根据对这三种技术的使用策略和组合架构,可以把 RAID 分为不同的等级,以满足不同数据应用的需求。
D. A. Patterson 等的论文中定义了 RAID0 ~ RAID6 原始 RAID 等级。随后存储厂商又不断推出 RAID7、 RAID10、RAID01 、 RAID50 、 RAID53 、 RAID100 等 RAID 等级,但这些并无统一的标准。目前业界与学术界公认的标准是 RAID0 ~ RAID6 ,而在实际应用领域中使用最多的 RAID 等级是 RAID0 、RAID1 、 RAID3 、 RAID5 、 RAID6 和 RAID10。
RAID每一个等级代表一种实现方法和技术,等级之间并无高低之分。在实际应用中,应当根据用户的数据应用特点,综合考虑可用性、性能和成本来选择合适的RAID 等级,以及具体的实现方式。
3 关键技术
- 镜像技术
镜像技术是一种冗余技术,为磁盘提供数据备份功能,防止磁盘发生故障而造成数据丢失。对于 RAID而言,采用镜像技术最典型地的用法就是,同时在磁盘阵列中产生两个完全相同的数据副本,并且分布在两个不同的磁盘上。镜像提供了完全的数据冗余能力,当一个数据副本失效不可用时,外部系统仍可正常访问另一副本,不会对应用系统运行和性能产生影响。而且,镜像不需要额外的计算和校验,故障修复非常快,直接复制即可。镜像技术可以从多个副本进行并发读取数据,提供更高的读 I/O 性能,但不能并行写数据,写多个副本通常会导致一定的 I/O 性能下降。
镜像技术提供了非常高的数据安全性,其代价也是非常昂贵的,需要至少双倍的存储空间。高成本限制了镜像的广泛应用,主要应用于至关重要的数据保护,这种场合下的数据丢失可能会造成非常巨大的损失。
数据条带技术
将一个数据拆开,并行写给多个磁盘中;数据条带化技术是一种自动将 I/O操作负载均衡到多个物理磁盘上的技术。更具体地说就是,将一块连续的数据分成很多小部分并把它们分别存储到不同磁盘上。这就能使多个进程可以并发访问数据的多个不同部分,从而获得最大程度上的 I/O并行能力,极大地提升 性能。数据校验技术
数据校验技术是指, RAID 要在写入数据的同时进行校验计算,并将得到的校验数据存储在 RAID 成员磁盘中。校验数据可以集中保存在某个磁盘或分散存储在多个不同磁盘中。当其中一部分数据出错时,就可以对剩余数据和校验数据进行反校验计算重建丢失的数据。
数据校验技术相对于镜像技术的优势在于节省大量开销,但由于每次数据读写都要进行大量的校验运算,对计算机的运算速度要求很高,且必须使用硬件 RAID 控制器。在数据重建恢复方面,检验技术比镜像技术复杂得多且慢得多。
4 RAID分类
从实现角度看, RAID 主要分为软 RAID、硬 RAID 以及混合 RAID 三种。
软 RAID
所有功能均有操作系统和 CPU 来完成,没有独立的 RAID 控制处理芯片和 I/O 处理芯片,效率自然最低。软件完成硬 RAID
配备了专门的 RAID 控制处理芯片和 I/O 处理芯片以及阵列缓冲,不占用 CPU 资源。效率很高,但成本也很高。硬件完成混合 RAID
具备 RAID 控制处理芯片,但没有专门的I/O 处理芯片,需要 CPU 和驱动程序来完成。性能和成本在软RAID 和硬 RAID 之间。软硬完成
5 常见RAID等级详解
- JBOD
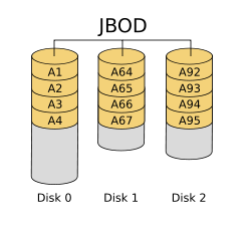
JBOD ,Just a Bunch of Disks,磁盘簇。表示一个没有控制软件提供协调控制的磁盘集合,这是 RAID区别与 JBOD 的主要因素。 JBOD 将多个物理磁盘串联起来,提供一个巨大的逻辑磁盘。
JBOD 的数据存放机制是由第一块磁盘开始按顺序往后存储,当前磁盘存储空间用完后,再依次往后面的磁盘存储数据。 JBOD 存储性能完全等同于单块磁盘,而且也不提供数据安全保护。
多块磁盘组成的逻辑磁盘;
其只是简单提供一种扩展存储空间的机制,JBOD可用存储容量等于所有成员磁盘的存储空间之和
JBOD 常指磁盘柜,而不论其是否提供 RAID 功能。不过,JBOD并非官方术语,官方称为Spanning。
- RAID0
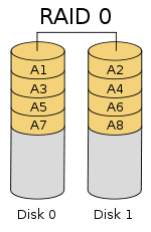
RAID0 是 一种简单的、无数据校验的数据条带化技术。实际上不是一种真正的 RAID ,因为它并不提供任何形式的冗余策略 。 RAID0 将所在磁盘条带化后组成大容量的存储空间,将数据分散存储在所有磁盘中,以独立访问方式实现多块磁盘的并读访问。
理论上讲,一个由 n 块磁盘组成的 RAID0 ,它的读写性能是单个磁盘性能的 n 倍, 但由于总线带宽等多种因素的限制, 实际的 性能提升低于理论值。由于可以并发执行 I/O 操作,总线带宽得到充分利用。再加上不需要进行数据校验,RAID0 的性能在所有 RAID 等级中是最高的。
RAID0 具有低成本、高读写性能、 100% 的高存储空间利用率等优点,但是它不提供数据冗余保护,一旦数据损坏,将无法恢复。
应用场景:对数据的顺序读写要求不高,对数据的安全性和可靠性要求不高,但对系统性能要求很高的场景。
RAID0与JBOD相同点:
1)存储容量:都是成员磁盘容量总和
2)磁盘利用率,都是100%,即都没有做任何的数据冗余备份
RAID0与JBOD不同点:
JBOD:数据是顺序存放的,一个磁盘存满后才会开始存放到下一个磁盘
RAID:各个磁盘中的数据写入是并行的,是通过数据条带技术写入的。其读写性能是JBOD的n倍
- RAID1
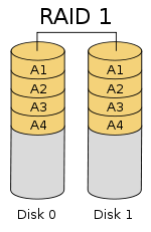
RAID1 就是一种镜像技术,它将数据完全一致地分别写到工作磁盘和镜像磁盘,它的磁盘空间利用率为 50% 。 RAID1 在数据写入时,响应时间会有所影响,但是读数据的时候没有影响。RAID1提供了最佳的数据保护,一旦工作磁盘发生故障,系统将自动切换到镜像磁盘,不会影响使用。
RAID1是为了增强数据安全性使两块磁盘数据呈现完全镜像,从而达到安全性好、技术简单、管理方便。 RAID1 拥有完全容错的能力,但实现成本高。
应用场景:对顺序读写性能要求较高,或对数据安全性要求较高的场景。
- RAID10

RAID10是一个RAID1与RAID0的组合体,所以它继承了RAID0的快速和RAID1的安全。
简单来说就是,先做条带,再做镜像。发即将进来的数据先分散到不同的磁盘,再将磁盘中的数据做镜像。
- RAID01
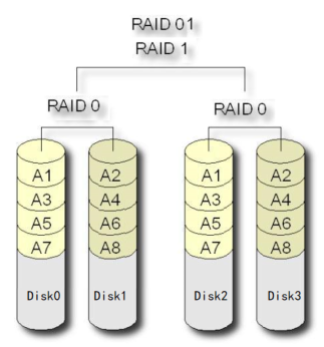
RAID01是一个RAID0与RAID1的组合体,所以它继承了RAID0的快速和RAID1的安全。
简单来说就是,先做镜像,再做条带。即将进来的数据先做镜像,再将镜像数据写入到与之前数据不同的磁盘,即再做条带。
RAID10要比RAID01的容错率再高,所以生产环境下一般是不使用RAID01的。
七、集群搭建实践
1 集群架构
这里要搭建一个双主双从异步复制的Broker集群。为了方便,这里使用了两台主机来完成集群的搭建。
这两台主机的功能与broker角色分配如下表。
| 序号 | 主机名/IP | IP | 功 能 | BROKER角色 |
|---|---|---|---|---|
| 1 | s4 | 192.168.109.104 | NameServer + Broker | Master1 + Slave2 |
| 2 | s5 | 192.168.109.105 | NameServer + Broker | Master2 + Slave1 |
2 克隆生成rocketmqOS1
克隆rocketmqOS主机,并修改配置。指定主机名为rocketmqOS1。
IP |
设置主机名:
hostnamectl set-hostname 你要设置的主机名 |
设置映射:
vim /etc/hosts |
3 修改rocketmqOS1配置文件
- 配置文件位置
要修改的配置文件在rocketMQ解压目录的conf/2m-2s-async目录中
修改broker-a.properties———-Master机
- 将该配置文件内容修改为如下:
# 指定整个broker集群的名称,或者说是RocketMQ集群的名称
brokerClusterName=DefaultCluster
# 指定master-slave集群的名称。一个RocketMQ集群可以包含多个master-slave集群
brokerName=broker-a
# master的brokerId为0
brokerId=0
# 指定删除消息存储过期文件的时间为凌晨4点
deleteWhen=04
# 指定未发生更新的消息存储文件的保留时长为48小时,48小时后过期,将会被删除
fileReservedTime=48
# 指定当前broker为异步复制master
brokerRole=ASYNC_MASTER
# 指定刷盘策略为异步刷盘
flushDiskType=ASYNC_FLUSH
# 指定Name Server的地址
namesrvAddr=192.168.109.104:9876;192.168.109.105:9876
- 将该配置文件内容修改为如下:
修改broker-b-s.properties——-Salve机
- 将该配置文件内容修改为如下
brokerClusterName=DefaultCluster
# 指定这是另外一个master-slave集群
brokerName=broker-b
# slave的brokerId为非0
brokerId=1
deleteWhen=04
fileReservedTime=48
# 指定当前broker为slave
brokerRole=SLAVE
flushDiskType=ASYNC_FLUSH
namesrvAddr=192.168.109.104:9876;192.168.109.105:9876
# 指定Broker对外提供服务的端口,即Broker与producer与consumer通信的端口。默认10911。由于当前主机同时充当着master1与slave2,而前面的master1使用的是默认端口。这里需要将这两个端口加以区分,以区分出master1与slave2
listenPort=11911
# 指定消息存储相关的路径。默认路径为~/store目录。由于当前主机同时充当着master1与slave2,master1使用的是默认路径,这里就需要再指定一个不同路径
storePathRootDir=~/store-s
storePathCommitLog=~/store-s/commitlog
storePathConsumeQueue=~/store-s/consumequeue
storePathIndex=~/store-s/index
storeCheckpoint=~/store-s/checkpoint
abortFile=~/store-s/abort
- 将该配置文件内容修改为如下
其他配置
- 除了以上配置外,这些配置文件中还可以设置其它属性。
#指定整个broker集群的名称,或者说是RocketMQ集群的名称
brokerClusterName=rocket-MS
#指定master-slave集群的名称。一个RocketMQ集群可以包含多个master-slave集群
brokerName=broker-a
#0 表示 Master,>0 表示 Slave
brokerId=0
#多个nameServer地址,分号分割
namesrvAddr=nameserver1:9876;nameserver2:9876
#默认为新建Topic所创建的队列数
defaultTopicQueueNums=4
#是否允许 Broker 自动创建Topic,建议生产环境中关闭
autoCreateTopicEnable=true
#是否允许 Broker 自动创建订阅组,建议生产环境中关闭
autoCreateSubscriptionGroup=true
#Broker对外提供服务的端口,即Broker与producer与consumer通信的端口
listenPort=10911
#HA高可用监听端口,即Master与Slave间通信的端口,默认值为listenPort+1
haListenPort=10912
#指定删除消息存储过期文件的时间为凌晨4点
deleteWhen=04
#指定未发生更新的消息存储文件的保留时长为48小时,48小时后过期,将会被删除
fileReservedTime=48
#指定commitLog目录中每个文件的大小,默认1G
mapedFileSizeCommitLog=1073741824
#指定ConsumeQueue的每个Topic的每个Queue文件中可以存放的消息数量,默认30w条
mapedFileSizeConsumeQueue=300000
#在清除过期文件时,如果该文件被其他线程所占用(引用数大于0,比如读取消息),此时会阻止此次删除任务,同时在第一次试图删除该文件时记录当前时间戳。该属性则表示从第一次拒绝删除后开始计时,该文件最多可以保留的时长。在此时间内若引用数仍不为0,则删除仍会被拒绝。不过时间到后,文件将被强制删除
destroyMapedFileIntervalForcibly=120000
#指定commitlog、consumequeue所在磁盘分区的最大使用率,超过该值,则需立即清除过期文
件
diskMaxUsedSpaceRatio=88
#指定store目录的路径,默认在当前用户主目录中
storePathRootDir=/usr/local/rocketmq-all-4.5.0/store
#commitLog目录路径
storePathCommitLog=/usr/local/rocketmq-all-4.5.0/store/commitlog
#consumeueue目录路径
storePathConsumeQueue=/usr/local/rocketmq-all-4.5.0/store/consumequeue
#index目录路径
storePathIndex=/usr/local/rocketmq-all-4.5.0/store/index
#checkpoint文件路径
storeCheckpoint=/usr/local/rocketmq-all-4.5.0/store/checkpoint
#abort文件路径
abortFile=/usr/local/rocketmq-all-4.5.0/store/abort
#指定消息的最大大小
maxMessageSize=65536
#Broker的角色
# - ASYNC_MASTER 异步复制Master
# - SYNC_MASTER 同步双写Master
# - SLAVE
brokerRole=SYNC_MASTER
#刷盘策略
# - ASYNC_FLUSH 异步刷盘
# - SYNC_FLUSH 同步刷盘
flushDiskType=SYNC_FLUSH
#发消息线程池数量
sendMessageThreadPoolNums=128
#拉消息线程池数量
pullMessageThreadPoolNums=128
#强制指定本机IP,需要根据每台机器进行修改。官方介绍可为空,系统默认自动识别,但多网卡时IP地址可能读取错误
brokerIP1=192.168.3.105
- 除了以上配置外,这些配置文件中还可以设置其它属性。
–
4 克隆生成rocketmqOS2
克隆rocketmqOS1主机,并修改配置。指定主机名为rocketmqOS2。
5 修改rocketmqOS2配置文件
对于rocketmqOS2主机,同样需要修改rocketMQ解压目录的conf目录的子目录2m-2s-async中的两个配置文件。
修改broker-b.properties—–Master机
- 将该配置文件内容修改为如下:
brokerClusterName=DefaultCluster
brokerName=broker-b
brokerId=0
deleteWhen=04
fileReservedTime=48
brokerRole=ASYNC_MASTER
flushDiskType=ASYNC_FLUSH
namesrvAddr=192.168.109.104:9876;192.168.109.105:9876
- 将该配置文件内容修改为如下:
修改broker-a-s.properties———Salve机
- 将该配置文件内容修改为如下:
brokerClusterName=DefaultCluster
brokerName=broker-a
brokerId=1
deleteWhen=04
fileReservedTime=48
brokerRole=SLAVE
flushDiskType=ASYNC_FLUSH
namesrvAddr=192.168.109.104:9876;192.168.109.105:9876
listenPort=11911
storePathRootDir=~/store-s
storePathCommitLog=~/store-s/commitlog
storePathConsumeQueue=~/store-s/consumequeue
storePathIndex=~/store-s/index
storeCheckpoint=~/store-s/checkpoint
abortFile=~/store-s/abort
- 将该配置文件内容修改为如下:
6 启动服务器
启动NameServer集群
- 分别启动rocketmqOS1与rocketmqOS2两个主机中的NameServer。启动命令完全相同。
nohup sh bin/mqnamesrv & tail -f ~/logs/rocketmqlogs/namesrv.log

- 分别启动rocketmqOS1与rocketmqOS2两个主机中的NameServer。启动命令完全相同。
启动两个Master
- 分别启动rocketmqOS1与rocketmqOS2两个主机中的broker master。注意,它们指定所要加载的配置文件是不同的。
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-a.properties &
tail -f ~/logs/rocketmqlogs/broker.log
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-b.properties &
tail -f ~/logs/rocketmqlogs/broker.log
- 分别启动rocketmqOS1与rocketmqOS2两个主机中的broker master。注意,它们指定所要加载的配置文件是不同的。
启动两个Slave
- 分别启动s4与s5两个主机中的broker slave。注意,它们指定所要加载的配置文件是不同的。
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-b-s.properties &
tail -f ~/logs/rocketmqlogs/broker.log
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-a-s.properties &
tail -f ~/logs/rocketmqlogs/broker.log
- 分别启动s4与s5两个主机中的broker slave。注意,它们指定所要加载的配置文件是不同的。
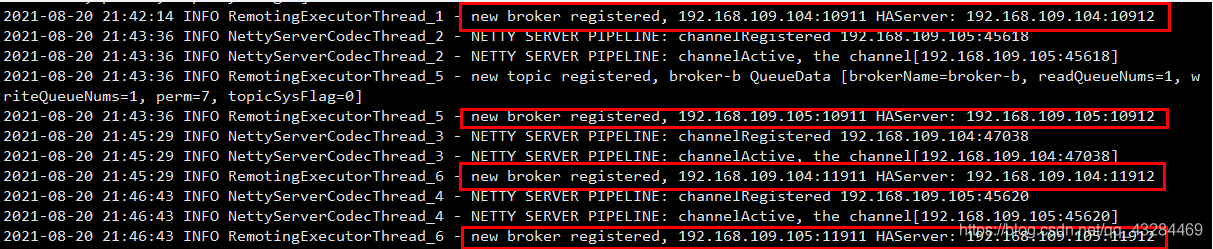
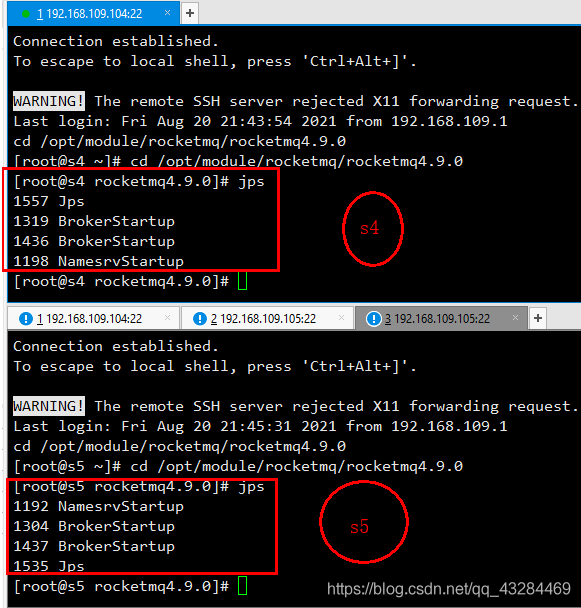
两台机器s4/s5,两个小集群,s4中broker-a|broker-b-s,s5中broker-b|broker-a-s组成一个rocket集群
八、mqadmin命令
在mq解压目录的bin目录下有一个mqadmin命令,该命令是一个运维指令,用于对mq的主题,集群,broker 等信息进行管理。
1 修改bin/tools.sh
在运行mqadmin命令之前,先要修改mq解压目录下bin/tools.sh配置的JDK的ext目录位置。本机的ext目录在/usr/local/java/jdk1.8.0_161/jre/lib/ext。
使用vim命令打开tools.sh文件,并在JAVA_OPT配置的-Djava.ext.dirs这一行的后面添加ext的路径。


JAVA_OPT="${JAVA_OPT} -server -Xms1g -Xmx1g -Xmn256m - |
2 运行mqadmin
直接运行该命令,可以看到其可以添加的commands。通过这些commands可以完成很多的功能。
[root@s4 bin]# ./mqadmin |
3 该命令的官网详解
- 该命令在官网中有详细的用法解释。
https://github.com/apache/rocketmq/blob/master/docs/cn/operation.md